|
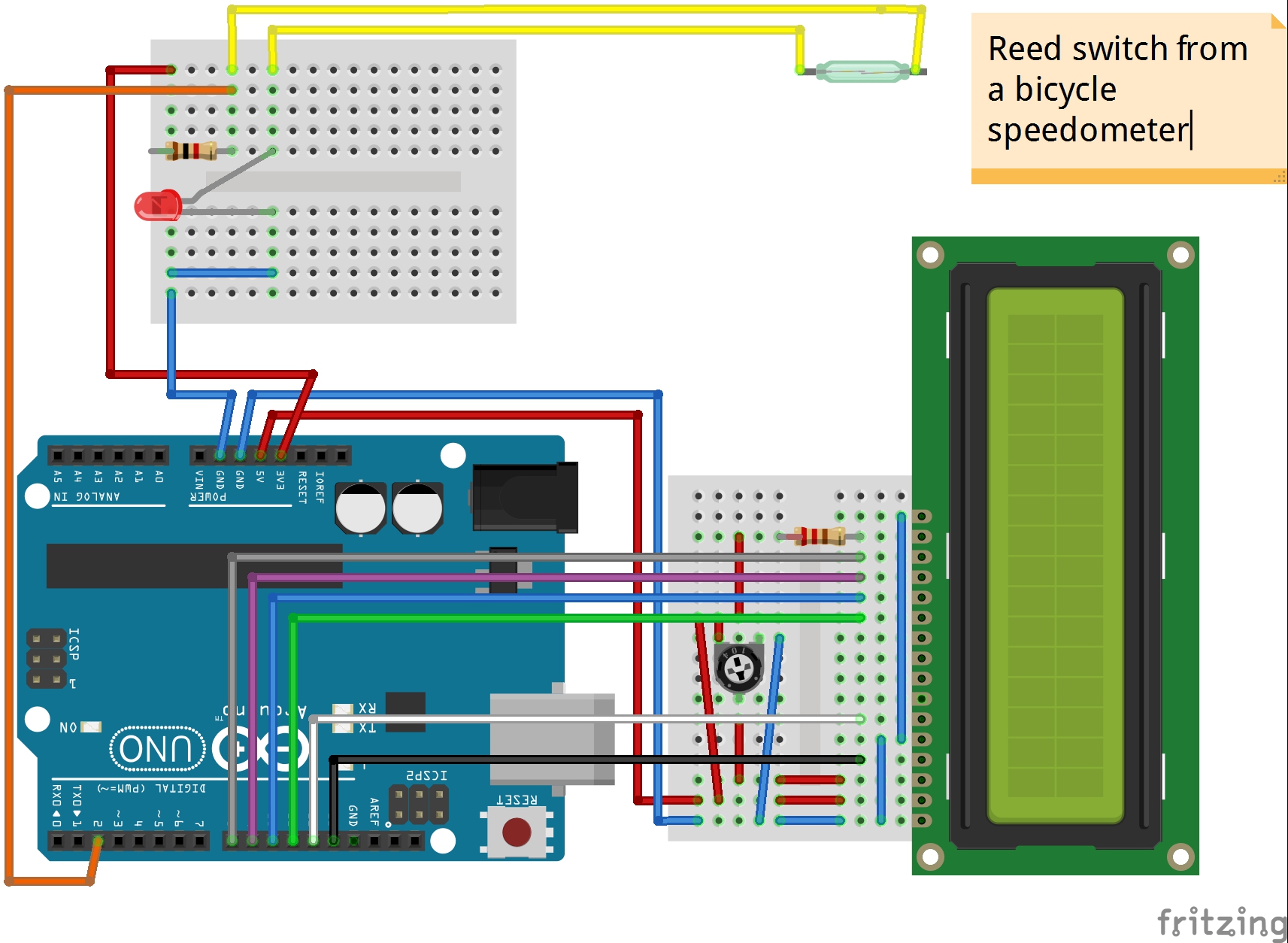
Circuito (disegnato con Fritzing) |
|
Circuit (designed with Fritzing) |
|
Quando ho deciso di fare un tachimetro con Arduino, ho cercato con Google e quasi subito ho trovato questo progetto di John Boxall (guardate l'Esempio 37.3), che sfortunatamente non comprendeva schemi del circuito e non era stato testato con un vero interruttore magnetico. |
|
When I decided to make a speedometer with Arduino, I googled around and immediately found this project by John Boxall (see Example 37.3), that unfortunately did not include circuit schematics and wasn't tested with an actual reed switch. |
|
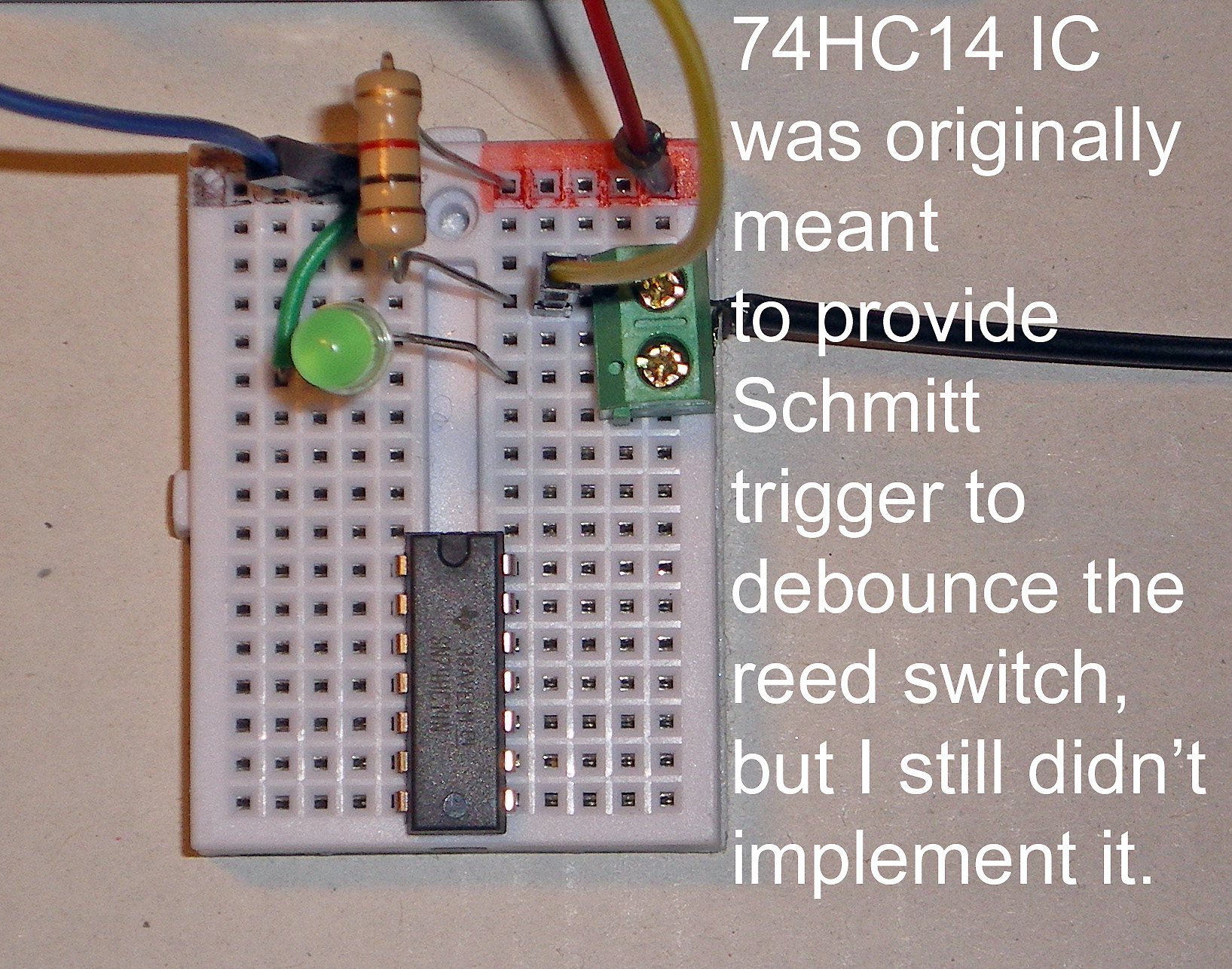
Dettaglio della micro-breadboard dove è attestato il sensore |
|
Detail of the micro-breadboard where the sensor is connected |
|
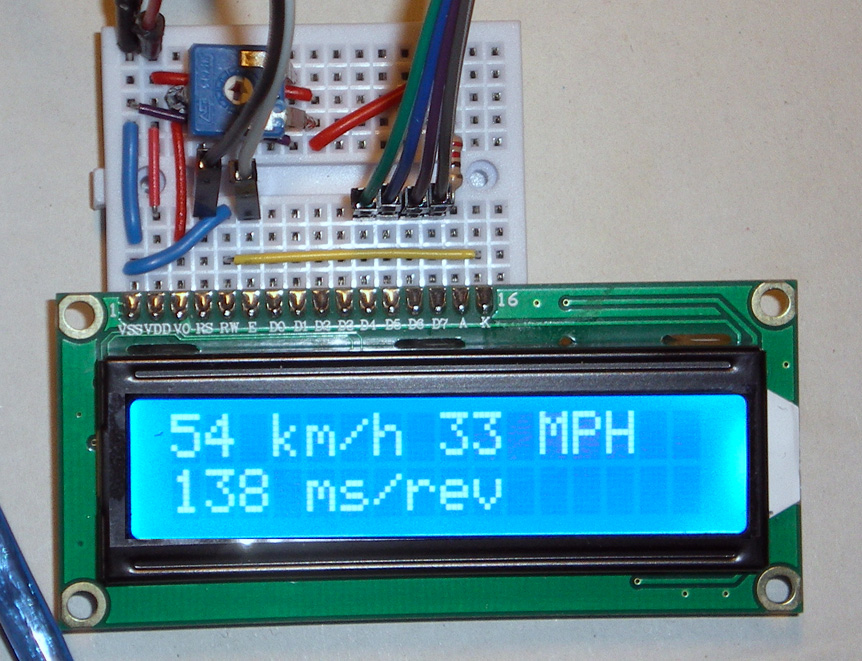
Dettaglio della micro-breadboard dove è attestato lo schermo LCD |
|
Detail of the micro-breadboard where the LCD screen is connected |
/* Arduino Speedometer by Cesare Brizio | CC by-sa-nc this sketch is in the public domain Version 1.0 - 26 february 2019 ------------------------------ The implementation is relatively rough: - wheel circumference has to be hard-coded - an attempt at debouncing has been made both at physical and software level - to no avail. Will be revised soon. A few more details here: http://www.cesarebrizio.it/Arduino/Speedometer.html
Modified from an original by John Boxall Example 37.3 - Basic speedometer using millis(); http://tronixstuff.com/tutorials > chapter 37 John Boxall | CC by-sa-nc Hardware - you will need a sensor. For example - a reed switch and magnet. Consider the reed switch to be a normally-open button, and connect as usual with a pull-down resistor. ========================== The circuit for LCD board (HD4770 compatible display) 4-wire dialogue ========================== * LCD RS pin to digital pin 15 * LCD Enable pin to digital pin 14 * LCD D4 pin to digital pin 5 * LCD D5 pin to digital pin 4 * LCD D6 pin to digital pin 3 * LCD D7 pin to digital pin 2 * LCD R/W pin to ground * LCD VSS pin to ground * LCD VCC pin to 5V * 10K resistor: * ends to +5V and ground * wiper to LCD VO pin (pin 3) */ // include the library code: #include <LiquidCrystal.h> // initialize the library with the numbers of the interface pins const int rs = 13, en = 12, d4 = 11, d5 = 10, d6 = 9, d7 = 8; LiquidCrystal lcd(rs, en, d4, d5, d6, d7); float start, finished; float elapsed, time; float circMetric=2.093; // wheel circumference (in meters) float circImperial; // using 1 kilometer = 0.621371192 miles float speedk, speedm; // holds calculated speed vales in metric and imperial void setup() { // convert metric to imperial for MPH calculations circImperial=circMetric*.62137; // the syntax with digitalPinToInterrupt should allow portability //among different Arduino models - see https://www.arduino.cc/reference/en/language/functions/external-interrupts/attachinterrupt/ attachInterrupt(digitalPinToInterrupt(2), speedCalc, RISING); // interrupt called when sensors sends digital 2 high (every wheel rotation) //attachInterrupt(0, speedCalc, RISING); // interrupt called when sensors sends digital 2 high (every wheel rotation) //start now (it will be reset by the interrupt after calculating revolution time) start=millis(); // set up the LCD's number of columns and rows: lcd.begin(16, 2); // Print a transitory message to the LCD. lcd.print("Ardu-Speedometer"); delay(2000); //just to allow you to read the initialization message // top serial dialogue speed improves precision Serial.begin(115200); } void speedCalc() { //Function called by the interrupt if((millis()-start)>100) // 100 millisec debounce { //calculate elapsed elapsed=millis()-start; //reset start start=millis(); //calculate speed in km/h speedk=(3600*circMetric)/elapsed; //calculate speed in mph speedm=(3600*circImperial)/elapsed; } } void loop() { // The loop will be interrupted by the sensor each time the // magnet passes near the sensor, in other words once per revolution // Top line in the 16 char, 2 lines display - speed data lcd.setCursor(0,0); lcd.print(" "); lcd.setCursor(0,0); lcd.print(int(speedk)); lcd.print(" km/h "); lcd.print(int(speedm)); lcd.print(" MPH "); //bottom line the 16 char, 2 lines display - time data lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(int(elapsed)); lcd.print(" ms/rev "); // adjust for personal preference to minimise flicker //delay(250); }
❦